
SEEFOR 4 (2): 59-79
DOI: https://doi.org/10.15177/seefor.13-07
Review paper
Airborne Laser Scanning - the Status and Perspectives for the Application in the South-East European Forestry
Ivan Balenović 1, Giorgio Alberti 2, 3 Hrvoje Marjanović 4*
1 Croatian Forest Research Institute, Trnjanaska cesta 35, 10 000 Zagreb, Croatia
2 Department of Agricultural and Environmental Sciences, University of Udine, v. delle Scienze 206, I-33100 Udine, Italy
3 MOUNTFOR Project Centre, European Forest Institute, Via E.Mach 1, San Michele all’Adige (TN), Italy
4 Croatian Forest Research Institute, Cvjetno naselje 41, 10 450 Jastrebarsko, Croatia
* Corresponding author: e-mail:
Citation:
BALENOVIĆ I, ALBERTI G, MARJANOVIĆ H 2013 Airborne Laser Scanning - the Status and Perspectives for the Application in the South-East European Forestry. South-east Eur for 4 (2): 59-79. DOI: https://doi.org/10.15177/seefor.13-07
Cited by: CrossRef Google Scholar
Abstract
Background and Purpose: Over the last twenty years airborne laser scanning (ALS) technology, also referred to as LiDAR, has been established in a many disciplines as a fully automated and highly efficient method of collecting spatial data. In Croatia, as well as in most countries of the South-East Europe (SEE) with the exception of Slovenia, the research on the application of ALS in forestry has not yet been conducted. Also, regional scientific and professional literature dealing with ALS application is scarce. Therefore, the main goal of this review paper is to present the ALS technology to the forestry community of SEE and to provide an overview of its potential application in forest inventory. The primary focus is given to discrete return ALS systems.
Conclusions and Future Research Streams: Results presented in this paper show that the ALS technology has a significant potential for application in forest inventory. Moreover, the two-phase forest inventory based on the combination of ALS and field measurements has become a quite common operational method. Due to the expected advancement of the ALS technology, it may be presumed that ALS will have an even more important role in forestry in the future. Therefore, researches on application of ALS technology in SEE forestry are needed, primarily focusing to question of “if” and “to what extent” the ALS technology can improve the existing terrestrial method of forest inventory. Besides the application in the classical forest inventory, the option to apply it for estimation of the biomass, carbon stock, combustible matter, etc, should also be further investigated.
Keywords: LiDAR, airborne laser scanning, discrete return system, forest inventory
INTRODUCTION
Remote sensing is nowadays commonly used within many environmental disciplines, such as geography, geology, botany, zoology, civil engineering, forestry, meteorology, agriculture, oceanography, etc. [1]. Besides the commonly used remote sensing techniques (e.g. satellite and aerial digital images), laser scanning technology has been established over the last twenty years as a fully automated and highly efficient method of collecting spatial data [2]. Laser scanning technology is also referred to as LiDAR (the acronym for Light Detection and Ranging) which means detection and distance determination using a pulse of light [3, 4].
The main characteristic of LiDAR systems is the ability to collect large quantities of highly accurate three-dimensional spatial data over large areas in a relatively short time [5]. The collected data, whether from airborne LiDAR systems mounted on aircrafts or spacecrafts, or from terrestrial LiDAR systems, have a high vertical and horizontal resolution. Airborne systems usually have decimetre and sometimes even a centimetre resolution, while terrestrial systems can have up to a millimetre resolution [6].
Although the invention of the laser and laser scanning goes back to the early 1960s, only with the development of the Geographic Positioning System (GPS) in the 1980s and the Inertial Measurement Unit (IMU) in the 1990s, as well as the rapid development of computer technology, a faster and significant progress in LiDAR technology was enabled [7]. This happened when a wider practical application of LiDAR systems, primarily for topographic mapping, began [8]. In the meantime, many geodetic companies have recognized the advantages of the LiDAR technology, so its application is expanding rapidly and in some cases replaces traditional geodetic methods [5].
The first studies of LiDAR systems in forestry started at the end of the 1990s, with the determination of terrain elevations, the estimation of stand height and volume, and the location and segmentation of individual trees [9, 10]. Since then, the LiDAR technology has been continuously and rapidly developing and therewith the possibilities of its application in forestry. In the last 15 years, this technology has encountered great interest among the scientist and researchers worldwide [3, 11].
In Croatia, as well as in most countries of the South-East Europe (SEE) (e.g. Bosnia and Herzegovina, Serbia, Montenegro, Macedonia, Albania, etc.) with the exception of Slovenia [12-14], research on the application of LiDAR in forestry have not yet been conducted. Also, regional scientific and professional literature dealing with the topics on LiDAR is poor [15]. Therefore, the main goal of this paper is to introduce the LiDAR (airborne laser scanning) technology to the forestry community of SEE providing an overview of its potential application through a critical review. Essentials of the LiDAR technological characteristics, with the focus on the possibilities of LIDAR application in forestry, primarily in forest inventories, are discussed. The primary focus is given to discrete return systems, the most often used type of airborne laser scanners both in research and practice.
AIRBORNE LASER SCANNING BACKGROUND
LiDAR is an active remote sensing system that uses laser light (pulses) for scanning and collecting highly accurate three-dimensional (x, y, z) spatial data of targets [16, 17]. LiDAR systems are based on laser ranging, which measures the range (distance) between the sensor (scanner) and the target by calculating the product of the speed of light and the time required for an emitted laser pulse to travel to the target object [16].
Since LiDAR is an ‘active’ system, it is independent of natural sunlight, and therefore operates in all ‘clear’ conditions - day or night (i.e. obstacle free, including dense fog or smog, which can intercept or scatter too much the infra-red light pulse emitted from the system) [18, 19] which results in the extended time for data collection [20]. Moreover, LiDAR cannot operate during rainy days, because the most commonly used infrared light does not penetrate water vapour [5].
Depending on the platform on which the LiDAR system is mounted, the laser scanning technology may be divided into: (a) Terrestrial Laser Scanning, (b) Airborne Laser Scanning, and (c) Spaceborne Laser Scanning [7, 21]. Airborne laser scanning (ALS) systems are the most common type of LiDAR sensors [22] and, compared to terrestrial and spaceborne laser scanning systems, they are the most suitable for application in forestry [23].
Generally, most ALS systems have four major hardware components: (a) a laser scanner, (b) a GPS, (c) an IMU, and (d) a computer for system management and storage of the collected data [9, 24]. ALS can be performed from an aircraft or a helicopter. Flying heights may vary from 20 to 6000 m, while they usually are in the range of 200-1000 m (200-300 m for helicopters, 500-1000 m for airplanes) [18, 24]. The ALS systems for terrestrial application (including forestry) generally operate in the near-infrared wavelength range of 900-1064 nm where the vegetation reflectance is high. Namely, due to the fact that in the visible wavelengths the absorption by vegetation is very high, thus relatively small share of incoming energy would be reflected back to the sensor [25].
Based on the ranging principle applied in the range (distance) measurements between the scanner and the target object, ALS systems may be categorized as discrete return (DR) or full-waveform (FW) systems [8, 16]. A FW system emits a continual pulse of laser radiation and records the entire reflected energy (waveform) for analysis. The range value is obtained by measuring the phase difference between the transmitted and the received signal (radiation) backscattered from the object’s surface [8, 9]. In contrast, a DR system records single or multiple returns from an emitted laser pulse [22]. The distance from the scanner to the reflecting objects is calculated as R=c×(t/2), where c is the laser pulse speed (assumed to be equal to the speed of light in the air) and t is the travelling time of the laser pulse from the scanner to the object and back [16].
During the last twenty years, the DR return system has been used more frequently in forest research and commercial purposes [26, 27]. Therefore, the primary focus in this paper is on the discrete return ALS.
The laser scanner is the core of any ALS system, and thus the DR system as well. According to Gajski [2], the main components of a discrete return laser scanner are: (a) a transmitter of laser pulses, (b) the scanning mechanism (e.g. rotating prism, oscillating mirror), and (c) a receiver with the component for measuring the travelled time of laser pulses.
During the ALS, laser pulses are emitted toward the terrain in the direction given by the scanning mechanism, usually side-to-side, perpendicular to the flight direction [2, 16]. Due to the aircraft (or helicopter) flight pattern, the scanning lines on the ground usually form Z-shaped (seesaw) scanning patterns (Figure 1). Depending on the type of the scanning mechanism, scanning patterns may also be of parallel, elliptical, sinusoidal or other forms [28, 29]. The scanning swath (or the swath width), i.e. the width of the area that may be ‘covered’ during the flight in one direction, is determined by the selected scanning angle (or the field of view) and the flying height [2, 30]. In order to provide a more complete representation of any given object within the scanning area, as well as to provide more rigorous and efficient swath-to-swath adjustments to remove swath biases, large areas are usually scanned with a series of swaths that often overlap by 50% or more [3, 29].
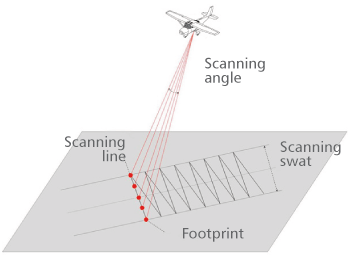
FIGURE 1. An illustration of the basic scanning attributes of the ALS data acquisition [28]
Therefore, along with the scanning lines, usually perpendicular to the flight line, the DR laser scanner emits near-infrared pulses of laser energy with a typical duration of a few nanoseconds (10-9 s) and with a high rate of the scanning frequency (up to 300 kHz) [5, 30]. This means that DR laser scanners are capable to emit up to 300,000 laser pulses per second. A diameter of the reflecting surface illuminated by a laser pulse is called the footprint diameter and depends on the pulse (beam) divergence and the flying height [28, 30]. For example, for the pulse divergences of 0.3 mrad, at a typical flying height of 1000 m, the laser footprint diameter is about 0.3 m [7]. Since the footprint diameter of DR systems usually ranges between 0.2-1.0 m, they are considered ‘small-footprint’ systems [3, 29]. On the other hand, ALS systems with a footprint diameter greater than 1.0 are called ‘large-footprint’.
The earliest DR systems were able to record only one ‘return’ (echo, reflection) or two (first and last) returns from a single laser pulse. Their primary use was for mapping applications, e.g. to create Digital Surface Models (DSMs) and Digital Terrain Models (DTMs) from the first and last returns, respectively [8, 31]. The most modern, so-called ‘multiple-return’ systems may record up to five returns from a single laser pulse [25, 28]. In multiple-return systems, when the laser pulse is intercepted by an object, a part of the energy is reflected toward the receiver and recorded as the first return. When the object is not solid or too dense (e.g. tree branches) and does not completely block the pulse, the remaining part of the pulse continues its path and may be reflected by lower objects as e.g. the second, third, or fourth return, or eventually reflected from the ground surface as the fifth (the last) return (Figure 2) [3, 15]. This case often occurs in forests where crowns have small gaps between the branches and foliage [3]. In theory, the last return should be reflected from the ground surface, but in practice, especially in environments such as a forest, the situation could be different. According to the study conducted by Chasmer et al. [32], only 50% of last returns in forests are usually reflected from the ground surface. Therefore, it is necessary to determine which of those last returns are reflected from the ground surface and which from some understory layer using different filtering and segmentation techniques. When the primary objective of ALS is to produce a DTM of a forested area, most of the scanning missions are taken during the leaf-off conditions, to maximize the percentage of pulses reflected from the ground surface. In contrast, when the primary objective is the determination of forest structure, ALS is usually done in leaf-on conditions to maximize the number of returns from tree crowns and other sub-canopy (understory) layers [3]. The major strength of multiple return systems is their ability to ‘see’ through the canopy and to record and measure the vertical forest structure [9, 33]. Therefore they could be useful in forest research or forest inventory measurements.
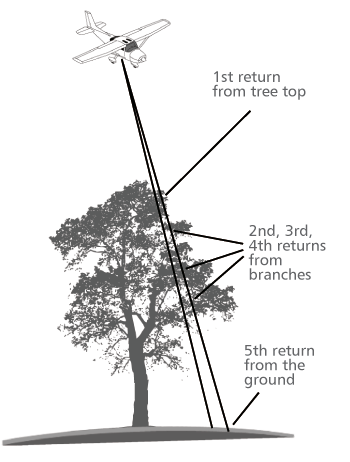
FIGURE 2. Multiple returns from a single laser pulse [26]
Pulse density, point density or scanning density is the most consistent measure of the spatial resolution of an ALS data set [28] and is commonly expressed as the number of pulses per m2. It is often confused with the return density (the mean number of returns per m2) even though the two densities are different, especially in cases of multiple return systems. Pulse density is an important parameter in the planning process of ALS, and is defined by horizontal footprint spacing. It may range from 0.3 to 20 pulses/m2 (or even more) and the optimal density is indicated by the application and a desired results [29]. It is important to recognize that the pulse density is positively correlated with the quality and precision of the resulting products, and consequently, with the acquisition costs. According to Evans et al. [29], pulse densities of 4-6 pulses/m2 are a good compromise between the cost and accuracy of the obtained data in vegetation applications, while some ALS providers recommend a minimum of 8 or even 15 pulses/m2 for forestry applications [34].
In order to geo-reference all the obtained returns the ALS systems are combined with a Position and Orientation System consisting of the GPS and IMU components. Three-dimensional (x, y, z) coordinates of the reflected points (returns) are then calculated based on the accurate position of the scanner determined from the GPS and the orientation of the scanner measured by the IMU [8, 16].
Each return of the laser pulse, besides the 3D coordinates, contains a record of the signal’s return intensity [16, 18]. The return intensity is usually recorded in 8 bits (values 0 to 255) or 12 bits (0 to 4095), and therefore may be presented as a grey-scale raster that looks like a black-white aerial photograph [28]. Because of the several factors influencing the recorded intensity, such image may not be used for classification purposes in the same way as aerial photograph. According to Baltsavias [16, 18], the recorded intensity depends on the flying height, atmospheric conditions, directional reflectance properties, the reflectivity of the target, and the laser settings. To overcome such an issue, ALS data may be combined with some other remote sensing data (i.e. multispectral, hyperspectral, etc.). For example, digital aerial cameras may be integrated with ALS system to simultaneously provide data of the surveyed area [35, 36].
The initial resulting product of any ALS system is a dense dataset of recorded returns with range measurements and additional positional information (GSP and IMU measurements), known as the point cloud. In order to obtain georeferenced data of high vertical and horizontal accuracy and other products (e.g. DTM, DSM), the processing of such raw data is necessary. According to Gajski [2], five major steps of the ALS data processing can be identified: (I) direct georeferencing based on the GPS and IMU measurements; (II) swath-to-swath (strip) adjustments for system calibration and detection of erroneous points; (III) the point cloud segmentation based on geometric characteristics of objects to which they refer; (IV) filtering by which useful information (points) are separated from the useless, and classification by which useful information is divided into classes (e.g. vegetation, objects, bare ground, etc.); and finally (V) data reducing to the minimum amount sufficient for a ‘description’ of the object with satisfactory quality.
As already mentioned, ALS data and products have a high vertical and horizontal accuracy which however primarily depends on the pulse (scanning) density. Accuracy is usually expressed as the root mean square error (RMSE): most ALS system vendors place the RMSE in the range of 5-15 cm for vertical and 25-100 cm for horizontal direction [3, 5].
APPLICATION IN FORESTRY
During the last 15 years, the ALS technology has encountered great interest within the forestry scientific and research community. Considerable research has been made on the possibilities of ALS application in forestry, in particular in forest inventories and in estimation of stand structure elements [27, 37]. However, the earliest research in forestry primarily focused on the creation of two main cartographic ALS products: DTMs and DSMs, used to describe forest terrain surfaces and tops of forest surfaces, respectively. These products were used for deriving the Canopy Height Model (CHM) which is the difference between canopy altitudes (DSM) and bare ground altitudes (DTM).From CHMs it is possible to estimate the stand structure elements, such as canopy (stand) heights, gain an insight into the vertical structure of stands [38] and derive other stand attributes such as stand volume or, stand biomass.
Generally, there are two main approaches to derive forest information from ALS data: the area-based (or distribution-based) approach (AB) and the individual tree-based approach (ITB) [3, 17, 26, 39]. The choice of the approach mostly depends on the desired accuracy of the final result and the available pulse density [17, 26].
Area-Based Approach
In the AB approach, the mean forest stand characteristics for a certain area (e.g. plot, stand) are estimated using statistical analyses and established empirical relationships (models) between ALS data (processed point clouds, DSMs or CHMs) and terrestrial measured variables [3, 37]. This approach was originally devised by Næsset [40, 41] and is also known as the two-stage procedure for stand inventory or the double-sampling forest inventory [42]. In the first phase, empirical relationships of ALS data (e.g. all returns aggregated at the plot level, percentiles of the relative height above ground, etc.) and the terrestrially measured data (e.g. height, density, basal area, volume, aboveground biomass) for particular sample plots are obtained.
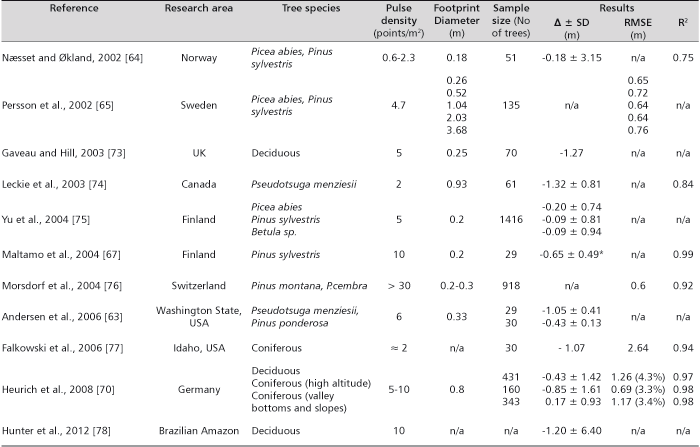
These relationships, in the second phase, are used to estimate forest characteristics (variables) on other plots in a particular area [38, 42].The results of past researches showed the potentials of AB methods in estimating stand structure elements, such as tree density [42, 43], mean stand height [17, 40, 42, 44-48], mean stem diameter [16, 42, 46, 49], mean basal area [42-46, 49], volume [41-43, 45-47, 49, 52, 53], aboveground biomass [45, 53-55] and carbon stocks [50, 56, 57] (Table 1). In addition, AB methods could be used for assessing leaf area index [58-60] and fuel parameters [61, 62].
TABLE 1. Overview of the results of ALS estimated forest stand variables using various area-based methods relative to terrestrially measured forest stand variables
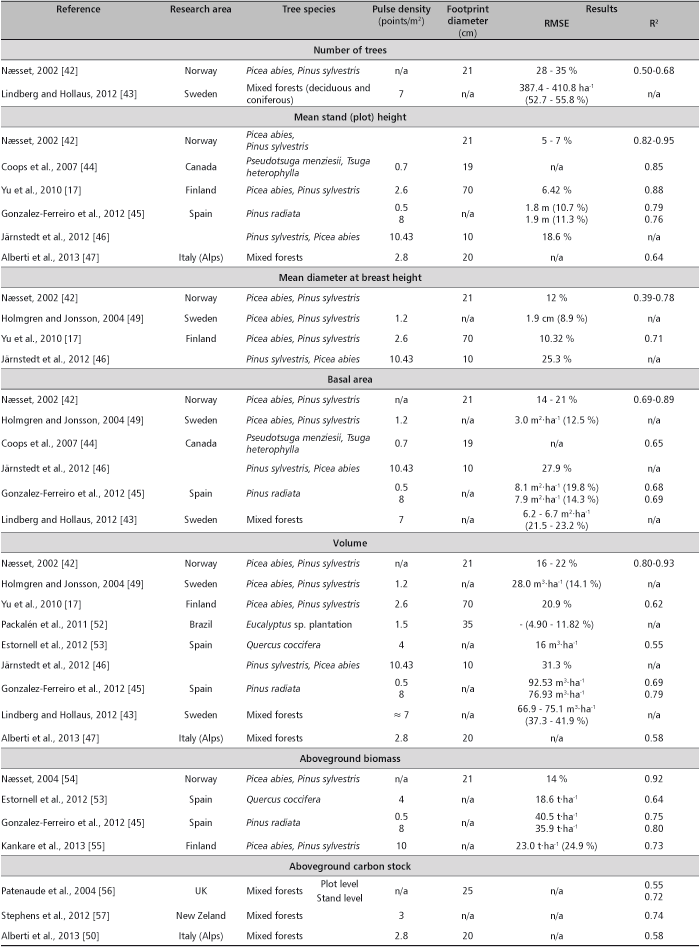
n/a - not available, i.e. not reported in the paper.
The advantage of the AB methods lays in the fact that they are applicable even with a lower pulse density. However, they require more ground measurements in the forest [17, 39], which are usually time consuming. The disadvantage is that the derived models are locally applicable, that is, specific for certain localities, types of forest stands and applied scanning methodology (flying height, pulse density, scanning angle, etc) [37, 38].
Individual Tree-Based Approach
The main goal of the ITB methods is to identify individual trees from ALS data (the processed point cloud, DSM or CHM) visually or by various segmenting processes and to extract individual tree attributes, such as total height and crown dimensions (diameter, area, height). Based on such directly estimated variables and by using existing models, other variables could be derived (i.e. diameter at breast height, the basal area, volume, biomass, carbon stock, combustible matter for fuel, etc). Similarly to AB methods, ITB methods also require a set of ground measurements. Reference data are usually obtained from direct measurement of trees on sample plots within the surveyed area. However, ITB methods require a significantly smaller reference data set [26], but they needs for a higher pulse densities than AB methods [17, 39].
According to Andersen et al. [63], LiDAR data (processed point cloud) enables the visual identification of individual trees, determining the tops and delineating the crowns, if the pulse density is at least 4-5 points /m2. Moreover, the previous research determined that in the forest stands of homogeneous structure the application of computer algorithms and segmentation may automatically detect individual trees and measure its parameters, such as the total tree height, crown height and crown diameter [63-67].
Tree Detection
The research results indicated that the application of the ALS technology may detect the majority of the trees, that is, their crowns from the canopy layer (dominant and co-dominant layer), especially in the older coniferous stands [65, 67-72]. However, problems arise for detecting trees of the understory layer, trees in young stands and/or with high stem densities, as well as deciduous stands. In such cases, the number of trees per ha is usually significantly underestimated [67-71] (Table 2).
TABLE 2. Overview of the results for detection of trees with ALS.
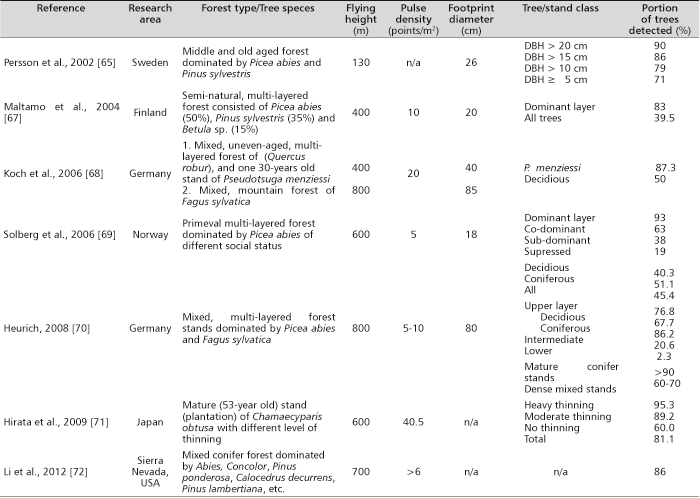
n/a - not available, i.e. not reported in the paper.
Tree Height Estimation
Previous studies mostly focused on both tree and mean stand height estimation using AB and ITB methods, mostly because height is a variable which can be directly determined from ALS data [27]. Moreover, height can be correlated with other stand variables (diameter at breast height, volume, biomass) which are difficult to measure directly (or even impossible) with current ALS technology [3, 33]. In many research papers [63-65, 67, 70, 73-78] it was concluded that, especially for trees in dominant and co-dominant layers, precise estimation of tree heights from ALS data is possible, although the height is underestimated in most cases (Table 3). According to Nelson et al. [79], the principal cause of such an underestimation lies in the small probability that the laser pulse hits the real top of the tree, especially in the case of low pulse density. As said before, the requirement to “hit” the top of tree crowns with a laser pulse, as well as to go all the way through the crown to the understory vegetation and to the ground, requires that the ALS is made with appropriate pulse density. This issue was underlined by Lefsky et al. [25] who emphasizes that the proper pulse density remains an important research question.
TABLE 3. Overview of the differences in tree height obtained with ALS and terrestrial measurements. Note that, when ∆ is negative, ALS underestimates tree height.
n/a - not available, i.e. not reported in the paper.
Δ - mean difference between tree heights derived from ALS and by terrestrial measurement; SD - standard deviation
* only Maltamo et al. 2004 reported values of standard error instead of SD
Based on the research results in spruce and Scots pine forests, Næsset and Økland [64] concluded that a pulse density lower than 2.3 points/m2 is insufficient to measure the size of individual trees (the total tree height and crown diameter). Takahashi et al. [80] conducted a study in Cryptomeria japonica (D. Don) plantations and concluded that the height estimations with deviations less than 1 m relative to the terrestrially measured heights require a pulse density higher than 8.8 points/m2. Hyyppä and Inken [81] stated that for a successful estimation of individual trees parameters the pulse density should be higher than 10 points/m2. Hyyppä et al. [10] emphasized that the accuracy of tree height estimation is influenced not only by the pulse density, but also by other variables such as: ALS system characteristics (footprint diameter, laser pulse divergence, scanning angle); the algorithms used for data processing; and the structural characteristics of the scanned vegetation (i.e. tree species, stand density, percentage and height of understory and ground vegetation, etc). Generally, the underestimation of tree height is less prominent for coniferous trees as they form conical, more compact and denser crowns, so that the penetration of the sent laser pulses through crowns is lower. On the other hand, the underestimation is higher with round crowns, as with most of deciduous trees, but also Scots pine [38].
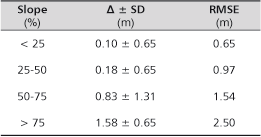
Although underestimation of tree height from ALS data is common, overestimation of tree height with ALS is common in hilly and mountainous areas, that is, terrains with slopes greater than 20° [70, 80, 82, 83]. Véga and Durrieu [83] estimated tree heights on the sample of 245 Black pine (Pinus nigra ssp. nigra) trees located in the southern French Alps with the mean terrain slope of about 53%. Tree heights obtained from ALS were overestimated on average 0.84m (± 1.63 m SD) in comparison to terrestrially measured heights. Moreover, Véga and Durrieu [83] found that overestimation of tree height from ALS increases with the increase of the terrain slope (Table 4). They suggest that there are two main reasons that cause overestimation of ALS tree heights: (i), DTM errors, and (ii) difference in the calculations of tree height between terrestrial and ALS measurements. The difference arises from the fact that ALS tree height is calculated as difference between z-coordinate of the tree top and the z-coordinate of the corresponding tree top projection on the terrain. But, the projection of the tree’s top for the tree that grows on slope is, on average, positioned slightly downhill with respect to centre of the tree’s stump, resulting with the overestimation of tree height. In addition, in terrestrial measurements, tree height is usually measured as the distance between up-hill side of the base of the stump and tree top, which could also result with lower values for tree heights in comparison with those measured with ALS (Figure 3).
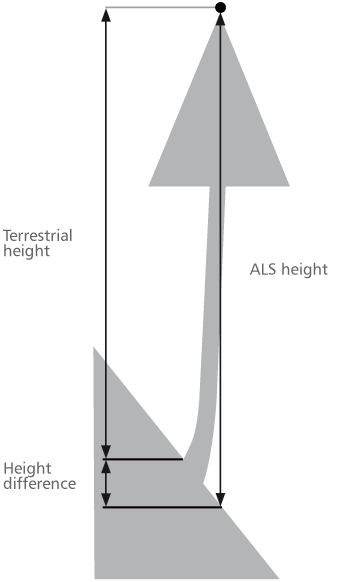
FIGURE 3. Difference between terrestrial derived and ALS derived tree height on steep slope. Terrestrial tree height is defined as the vertical distance from the tree apex to the up-slope base of the tree. The ALS tree height is usually calculated as the maximum value of the Canopy Height Model within the crown area [83].
TABLE 4. Differences in tree height obtained with ALS and from terrestrial measuremets for forest stands on slopes (according to research of Véga and Durrieu [83]). Note how overestimation of tree height from ALS (positive ∆) increases with slope.
Crown Area and Crown Diameter Estimation
Unlike tree height, it is harder to measure crown size (area, diameter) of individual trees from ALS data, since the results are more influenced by the pulse density, stand structure, but also the computer algorithm used for crown delineation [84]. Under the influence of these factors, ALS measurement can result with both an underestimation of crown size in some cases [65, 66, 70, 83], and an overestimation of crown size in other [68-70]. For example, based on their research Koch et al. [68] concluded that the applied automatic segmentation of crowns produces encouraging results in coniferous stands, as well as deciduous stands of lower density, where the 87.3% of trees and their location were correctly determined. However, crown areas were overestimated: the mean crown area of the segmented trees was 11m2, compared to 8.2 m2 obtained from the terrestrial or photogrammetric measurement of the reference tree. Furthermore, in their research Solberg et al. [69] presented a new method for single tree segmentation and characterization from CHM and its corresponding point cloud. Using segmentation method, crown diameters in multi-layered forest dominated by Norway spruce trees were overestimated by 0.8 m. Mean terrestrially measured crown diameter was 3.9 m, while the mean of the ALS derived estimates was 4.7 m. The Pearson correlation between the measured and estimated diameters was r=0.52, while the RMSE was 1.1 m. Among number of variables, Heurich [70] compared crown radii obtained by terrestrial measurement and by ALS. The research was conducted in the Bavarian Forest National Park in the mixed, multi-layered stands dominated by Norway spruce and Common beech. While the crown radii of the deciduous trees derived by the ALS were underestimated (-0.25±1.09 m), those of the conifers were overestimated (0.21±0.71 m). The R2 values of multiple regression models for estimation of crown radii from ALS data were 0.56 for deciduous and for conifers trees 0.45-0.55, respectively. At the same time, the RMSE values of the regression models for deciduous and conifers were 0.72 m (16.2%) and 0.26-0.50 m (10.3-14.5%), respectively. Véga and Durrie [83] evaluated the quality of ALS crown diameter estimation on two plots with different plot densities and concluded that measurement error, in this case underestimation, increases only slightly with the stand density. For the first plot, with density of 313 stem/ha, the mean error in crown diameter (underestimation) was -0.79 m (12.34 %), while for the second plot, with density of 746 stem/ha, it increased to -1 m (19.11 %).
Diameter at Breast Height, Volume, Biomass and Carbon Stock Estimations
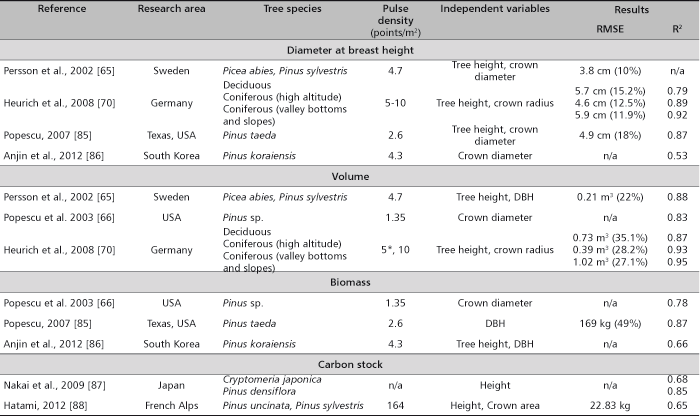
As was already mentioned, based on tree variables (height, crown diameter, crown area, etc) directly estimated from ALS data, and by using the existing empirical models, other desired variables of individual trees could be derived, such as diameter at breast height (dbh) [65, 70, 85, 86], volume [65, 66, 70], biomass [66, 85, 86], carbon stock [87, 88], etc. Some of the key findings from these studies are summarized in Table 5.
TABLE 5. Differences in values for tree dbh, volume, biomass, and carbon stock, estimated using various independant variables obtained with ALS, and values obtained from terrestrial measurements.
Tree Species Classification
The possibilities of automatic interpretations, that is, the classification of individual tree species from ALS data have been investigated in a number of studies. The automatic interpretation of tree species is largely made on the basis of the spatial configuration of recorded returns in the point cloud (crown structure) or on the return intensity values [27, 89-91]. The use of automatic interpretation based on the return intensity values approach presents a greater challenge for researches, mainly because there is currently no standardized ALS data calibration procedure [27, 92, 93]. For example, scanned return intensity values which are obtained for the same tree species but on different localities or in different scanning conditions usually differ. Those differences are the result of variations in a series of factors: the length and angle of the laser pulse divergences, the scanning angle, sensor characteristics, atmospheric influences on illumination reduction, the position of leaves and branches in crowns, terrain topography, etc [94]. Thus, the application of unique classification rules for the automatic interpretation of tree species in different areas and different ALS instrumental setup are hardly possible [27]. Therefore, numerous studies focus on the research of the possibilities for the improvement of tree species classification and interpretation by fusion of data from ALS and other remote sensing systems (digital airborne or spaceborne cameras, hyperspectral scanners, etc.) [74, 95-99].
CONCLUSIONS AND FUTURE RESEARCH STREAMS
In SEE countries the application of remote sensing in practical forestry usually implies only the use of orthophoto maps to assist in field orientation, although there are studies dealing with the potential use of satellite images [100], as well as digital aerial images [101-103] in forest management. But, unlike satellite and aerial images, the ALS technology has not yet been a subject of research in Croatia, as well as the entire region with the exception of Slovenia [12-14]. Therefore, we provide an overview of the state of the art of ASL technology focusing on its application in forestry.
At the beginning of applying the ALS technology, some of the main disadvantages were large and impractical records of scanning and their subsequent processing [2]. A significant progress in the latest, as well as in the technology application, occurred along with the progress of computer technology, namely with the increase in data storage capacity and development of numerous algorithms that significantly facilitated the processing and manipulation of such huge and complex records. Moreover, during the last twenty years, the ALS technology has undergone important technological improvements, particularly in the sense of increasing frequencies and pulse (scanning) densities, as well as improving the accuracy of the obtained data. Consequently, this also enabled higher fly heights and increase in the scanned area per fly-over, resulting with the reduction of time and costs of ALS.
ALS provides researchers, among other, with a novel approach in obtaining the information on the vertical structure of the forest stands at large areas and with high-density, making the ALS technology suitable for application in forestry [85], primarily in forest inventory [37]. Both, of the two methods (AB and ITB) for deriving forest information from ALS data described in this paper, have their advantages and disadvantages. In comparison with the ITB method, the AB method requires a larger quantity of referential terrestrial data necessary to calibrate ALS data [17, 39, 104], but is financially favourable and has been applied in practical forest inventory (e.g. in Norway since 2002) [105, 106]. The ITB methods provide more detailed information on forest stands and, unlike AB methods, on individual trees. However, they still have no practical use, mainly due to greater costs and more complex procedures of data processing.
Although our review of the existing researches showed that the ALS technology might have a significant potential for application in forestry, the majority of the reviewed papers, focus on pure, even-aged stands and/or forest cultures. At the same time, the researches of ALS application in natural, or close to nature deciduous forests, are rare, and in most cases an emphasis is made on the difficulties in retrieval of information due to the complexity of deciduous tree morphology and forest stand structure [68-70]. Tree species interpretation still presents one of the greatest challenges in application of ALS, particularly in mixed or deciduous stands [90, 91, 93]. Addressing this problem will probably require an improvement in ALS technology (i.e. decrease of survey costs), novel data processing algorithms for species recognition as well as improved integration of ALS data with other remotely sensed data.
Since 95% of Croatian forests are natural or semi-natural stands of various origins, cultivation, and structural forms, and over 60% are mixed stands [107], the conclusion may not be forwarded that the application of ALS technology would be justified for operational forestry purposes, either in Croatia or other countries of the region with similar forests. Therefore, it would be necessary to initiate ALS research in the South-east Europe region. In our opinion, at this stage the research should primarily focus on testing the potential for the use of ALS technology in forest inventory and forest management. However, since the ALS technology enables the measuring of the stand’s vertical structure (understory layer, bush, ground vegetation), besides the application in the classic forest inventory, the other useful research directions could be the estimation of the biomass quantity, carbon stock, combustible matter, etc.
Research of distribution and quantity of combustible matter is particularly important in the Mediterranean region. During the last few years, the number of forest fires and burnt surfaces in the wider Mediterranean area, as well as in Croatia, has increased [108]. Recent report by IPCC [109] states that under the high emission scenario (RPC8.5) there is “high confidence in likely surface drying” by the end of this century. This might result in increased tree mortality and higher risk of forest fire in general.
Thus, one of the potential areas to apply the ALS technology in Croatia, as well as all the countries and areas of the Mediterranean, is the estimation of combustible matter (dense, low shrub, coppice, maquis, etc) in forest stands which are usually not measured under the commercial forest management. The mapped data on the quantity of combustible matter, combined with precise DTM from ALS data offering an insight into the area configuration (limestone pavements, sinkholes…), may serve as the basis in fire risk assessment, as well as valuable asset in fire-fighting routes planning and prevention of forest fires.
Due to the expected advancement of the ALS technology, we may assume that ALS data will probably have important role in forestry in the future. Naturally, in times of a financial crisis, especially evident in the countries of the SEE, an important factor for the application of the ALS technology is the financial one. Therefore, we would recommend that any new research, which would address the application of ALS in forestry of the South-East European countries, should also have a part addressing economic aspects of ALS application.
Acknowledgment
Research presented in this paper was carried out within the project ‘Growth and development of forest in different ecological conditions and under different management’ financed by Ministry of Sciences, Education and Sport, and ‘Application of digital photogrammetry in practical forest management’, financed by Croatian Forests Ltd.
REFERENCES
- WENG Q 2009 Remote Sensing And GIS Integration - Theories, Methods and Application. The McGraw-Hill Education, Inc., New York, USA, 416 p
- GAJSKI D 2007 Basics of airborne laser scanning (in Croatian with English summary). Ekscentar 10: 16-22
- REUTEBUCH SE, ANDERSON HE, MCGAUGHEY BJ 2005 Light Detection and Ranging (LIDAR): An Emerging Tool for Multiple Resource Inventory. J Forest 103 (6): 286-292.
- CORONA P, CARTISANO R, SALVATI R, CHIRICI G, FLORIS A, DI MARTINO P, MARCHETTI M, SCRINZI G, et al. 2012 Airborne Laser Scanning to support forest resource management under alpine, temperate and Mediterranean environments in Italy. European Journal of Remote Sensing 45: 27-37. DOI: http://dx.doi.org/10.5721/EuJRS20124503#sthash.GMLKAFmS.dpuf
- CARTER J, SCHMID K, WATERS K, BETZHOLD L, HADLEY B, MATAOSKY R, HALLERAN J 2012 Lidar 101: An Introduction to Lidar Technology, Data, and Applications. NOAA Coastal Services Center, Charleston, SC, USA, 72 p. URL: http://csc.noaa.gov/digitalcoast/_/pdf/lidar101.pdf (20 February 2013)
- VOSSELMAN G, MASS HG 2010 Airborne and Terrestrial Laser Scanning. Whittles Publising, Dunbeath, Caithness, Scotland, UK, 336 p
- PETRIE G, TOTH CK 2008 Introduction to Laser Ranging, Profiling and Scanning. In: Shan J, Toth C K (eds) Topographic Laser Ranging and Scanning: Principles and Processing. CRC Press/Taylor & Francis, London, England, UK, pp 1-28
- WEHR A, LOHR U 1999 Airborne laser scanning - an introduction and overview. ISPRS J Photogramm 54 (2): 68-82. DOI: http://dx.doi.org/10.1016/S0924-2716(99)00011-8
- LIM K, TREITZ P, WULDER M, ST-ONGE B, FLOOD M 2003 LIDAR remote sensing of forest structure. Prog Phys Geog 27 (1): 88-106. DOI: http://dx.doi.org/10.1191/0309133303pp360ra
- HYYPPÄ J, HYYPPÄ H, LITKEY P, YU X, HAGGRÉN H, RÖNNHOLM P, PYYSALO U, PITKÄNEN J, MALTAMO M 2004 Algorithms and methods of airborne laser-scanning for forest measurements. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 36 (8): 1682-1750
- MONNET J-M 2012 Airborne Laser Scanning for Forest Applications - State-of-the-Art. 23 p. URL: http://www.alpine-space.eu/uploads/tx_txrunningprojects/Airborne_Laser_Scanning_for_Forest_Applications_-_State_of_the_Art.pdf (20 February 2013)
- KOBLER A, PFEIFER N, OGRINC P, TODOROVSKI LJ, OŠTIR K, DŽEROSKI S 2007 Repetitive interpolation: A robust algorithm for DTM generation from Aerial Laser Scanner Data in forested terrain. Remote Sens Environ 108 (1): 9-23. DOI: http://dx.doi.org/10.1016/j.rse.2006.10.013
- KOBAL M 2011 The influence of stand, soil and micro-site conditions on growth and development of silver fir (Abies alba Mill.) in high karst of Snežnik. PhD thesis, University of Ljubljanja, Ljubljana, Slovenia, 148 p
- KOBLER A 2011 New methods of processing aerial laser scanner data for forest ecosystem monitoring. PhD thesis, University of Ljubljana, Ljubljana, Slovenia, 131 p
- HEINIMANN HR, BRESCHAN J 2012 Pre-Harvest Assessment based on LiDAR data. Croat J For Eng 33 (2): 169-180
- BALTSAVIAS EP 1999 Airborne laser scanning: basic relations and formulas. ISPRS J Photogramm 54 (2-3): 199-214. DOI: http://dx.doi.org/10.1016/S0924-2716(99)00015-5
- YU X, HYYPPÄ J, HOLOPAINEN M, VASTARANTA M 2010 Comparison of Area-Based and Individual Tree-Based Methods for Predicting Plot-Level Forest Attributes. Remote Sens 2 (6): 1481-1495. DOI: http://dx.doi.org/10.3390/rs2061481
- BALTSAVIAS EP 1999 A comparison between photogrammetry and laser scanning. ISPRS J Photogramm 54 (2-3): 83-94. DOI: http://dx.doi.org/10.1016/S0924-2716(99)00014-3
- TURNER R 2007 An overview of Airborne LIDAR applications in New South Wales state forests. In: Growing Forest Values. Proceedings of ANZIF 2007 conference, Coffs Harbour, Australia, 3-7 June 2007. Institute of Foresters of Australia and New Zealand Institute of Forestry, Canberra, Australia, 22 p. URL: http://www.forestry.org.au/pdf/pdf-public/conference2007/papers/Turner%20Russell%20Lidar.pdf (20 November 2012)
- VENEZIANO D, SOULEYRETTE R, HALLMARK S 2002 Evaluation of LiDAR For Highway Planning, Location and Design. In: Conference Proceedings of Integrated Remote Sensing at the Global, Regional and Local Scale. ISPRS Comission I. Mid-Term Symposium in conjunction with Pecora 15/Land Satellite Information IV Conference, Denver, USA, 10 p. URL: http://www.isprs.org/proceedings/XXXIV/part1/paper/00029.pdf (25 November 2012)
- PETRIE G, TOTH CK 2008 Airborne and Spaceborne Laser Profilers and Scanners. In: Shan J, Toth CK (eds) Topographic Laser Ranging and Scanning: Principles and Processing. CRC Press/Taylor & Francis, London, England, UK, pp 29-87
- WULDER MA, WHITE JC, NELSON RF, NÆSSET E, ØRKA H, COOPS NC, HILKER T, BATER CW, GOBAKKEN T 2012 Lidar sampling for large-area forest characterization: A review. Remote Sens Environ 121: 196-209. DOI: http://dx.doi.org/10.1016/j.rse.2012.02.001
- RAHMAN MZA, GORTE BGH, BUCKSCH AK 2009 A new method for individual tree delineation from airborne LiDAR. In: Proceedings Silvilaser 2009, Austin, Texas, USA, 14-16 October 2009. Texas A&M University, College Station, TX, USA, pp 1-10
- BALTSAVIAS EP 1999 Airborne laser scanning: existing systems and firms and other resources. ISPRS J Photogramm 54 (2-3): 164-198. DOI: http://dx.doi.org/10.1016/S0924-2716(99)00016-7
- LEFSKY M, COHEN W, PARKER G, HARDING D 2002 Lidar remote sensing for ecosystem studies. Bioscience 52 (1): 19-30. DOI: DOI: http://dx.doi.org/10.1641/0006-3568(2002)052[0019:LRSFES]2.0.CO;2
- HYYPPÄ J, HYYPPÄ H, YU X, KAARTINEN H, KUKKO A, HOLOPAINEN M 2008 Forest Inventory Using Small-Footprint Airborne Lidar. In: Shan J, Toth C K (eds) Topographic Laser Ranging and Scanning: Principles and Processing. CRC Press/Taylor & Francis, London, England, UK, pp 335-370
- VAN LEEUWEN M, NIEUWENHUIS M 2010 Retrieval of forest structural parameters using LiDAR remote sensing. Eur J Forest Res 129 (4): 749-770. DOI: http://dx.doi.org/10.1007/s10342-010-0381-4
- GATZIOLIS D, ANDERSEN H-E 2008 A guide to LIDAR data acquisition and processing for the forests of the Pacific Northwest. Gen. Tech. Rep. PNW-GTR-768. Portland, OR: U.S. Department of Agriculture, Forest Service, Pacific Northwest Research Station, 32 p. URL: http://www.fs.fed.us/pnw/pubs/pnw_gtr768.pdf(15 October 2012)
- EVANS JS, HUDAK AT, FAUX R, SMITH AMS 2009 Discrete Return Lidar in Natural Resources: Recommendations for Project Planning, Data Processing, and Deliverables. Remote Sens 1 (4): 776-794. DOI:http://dx.doi.org/10.3390/rs1040776
- DIAZ JCF 2011 Lifting the canopy veil: airborne LiDAR for archeology of forested areas. Imaging Notes Magazine 26 (2): 31-34. URL: http://www.imagingnotes.com/go/article_freeJ.php?mp_id=264#1 (16 October 2012)
- HYYPPÄ J, YU X, HYYPPÄ H, MALTAMO M 2006 Methods of airborne laser scanning for forest information extraction. In: Proceedings of the International Workshop 3D Remote Sensing in Forestry, Vienna, Austria, 14-15 February. University of Natural Resources and Applied Sciences, Vienna, Austria, pp 63-78
- CHASMER L, HOPKINSON C, TREITZ P 2006 Investigating laser pulse penetration through a conifer canopy by integrating airborne and terrestrial lidar. Can J Remote Sens 32 (2): 116-125. DOI: http://dx.doi.org/10.5589/m06-011
- DUBAYAH RO, DRAKE JB 2000 Lidar remote sensing for forestry. J Forest 98 (6): 44-46. DOI: http://dx.doi.org/10.1191/0309133303pp360ra
- WATERSHED SCIENCES INC 2010 Minimum LiDAR Considerations in the Pacific Northwest. URL: http://www.oregongeology.org/sub/projects/olc/minimum-lidar-data-density.pdf (10 March 2013)
- RÖNNHOLM P, HONKAVAARA E, LITKEY P, HYYPPÄ H, HYYPPÄ J 2007 Integration of laser scanning and photogrammetry. In: Proceedings of the ISPRS 2007 Workshop on Laser Scanning 2007 and SilviLaser 2007, Vol. XXXVI, Part 3/W52, Espoo, Finland, 12-14 September 2007, pp 355-362
- NEX F 2010 Multi-Image Matching and LiDAR data new integration approach. PhD thesis, Politicnico di Torino, Torino, 235 p
- WULDER MA, BATER CW, COOPS NC, HILKER T, WHITE JC 2008 The role of LiDAR in sustainable forest management. For Chron 84 (6): 807-826. DOI: http://dx.doi.org/10.5558/tfc84807-6
- ROSETTE J, SUÁREZ J, NELSON R, LOS S, COOK B, NORTH P 2012 Lidar Remote Sensing for Biomass Assessment. In: Fatoyinbo T (ed) Remote Sensing of Biomass – Principles and Applications. InTech, Rijeka, Croatia, pp 3-26
- VASTARANTA M, HOLOPAINEN M, YU X, HAAPANEN R, MELKAS T, HYYPPÄ J, HYYPPÄ H 2011 Individual tree detection and area-based approach in retrieval of forest inventory characteristics from low-pulse airborne laser scanning data. Photogrammetric Journal of Finland 22 (2): 1-13
- NÆSSET E 1997 Determination of mean tree height of forest stands using airborne laser scanner data. ISPRS J Photogramm 52 (2): 49-56. DOI: http://dx.doi.org/10.1016/S0924-2716(97)83000-6
- NÆSSET E 1997 Estimating timber volume of forest stands using airborne laser scanner data. Remote Sens Environ 61 (2): 246-253. DOI: http://dx.doi.org/10.1016/S0034-4257(97)00041-2
- NÆSSET E 2002 Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens Environ 80 (1): 88-99. DOI: http://dx.doi.org/10.1016/S0034-4257(01)00290-5
- LINDBERG E, HOLLAUS M 2012 Comparison of Methods for Estimation of Stem Volume, Stem Number and Basal Area from Airborne Laser Scanning Data in a Hemi-Boreal Forest. Remote Sens 4 (4): 1004-1023. DOI: http://dx.doi.org/10.3390/rs4041004
- COOPS NC, HILKER T, WULDER M, ST-ONGE B, NEWNHAM G, SIGGINS A, TROFYMOW JA 2007 Estimating canopy structure of Douglas-fir forest stands from discrete-return LiDAR. Trees-Struct Funct 21 (3): 295-310. DOI: http://dx.doi.org/10.1007/s00468-006-0119-6
- GONZALEZ-FERREIRO E, DIÉGUEZ-ARANDA U, MIRANDA D 2012 Estimation of stand variables in Pinus radiata D. Don plantations using different LiDAR pulse densities. Forestry 85 (2): 281-292. DOI: http://dx.doi.org/10.1093/forestry/cps002
- JÄRNDSTEDT J, PEKKARINEN A, TUOMINEN S, GINZLER C, HOLOPAINEN M, VIITALA R 2012 Forest variable estimation using a high-resolution digital surface model. ISPRS J Photogramm 74: 78-84. DOI: http://dx.doi.org/10.1016/j.isprsjprs.2012.08.006
- ALBERTI G, BOSCUTTI F, PIROTTI F, BERTACCO C, DE SIMON G, SIGURA M, CAZORZI F, BONFANTI P 2013 A LiDAR-based approach for a multi-purpose characterization of Alpine forests: an Italian case study. iForest 6: 156-168. DOI: http://dx.doi.org/10.3832/ifor0876-006
- SMREČEK R, DANIHELOVÁ Z 2013 Forest stand height determination from low point density airborne laser scanning data in Roznava Forest enterprise zone (Slovakia). iForest 6: 48-54. DOI: http://dx.doi.org/10.3832/ifor0767-006
- HOLMGREN J, JONSSON T 2004 Large scale airborne laser scanning of forest resources in Sweden. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 36 (8): 157-160
- CORONA P, FATTORINI L 2008 Area-based LiDAR-assisted estimation of forest standing volume. Can J Forest Res 38 (11): 2911-2916. DOI: http://dx.doi.org/10.1139/X08-122
- BARBATI A, CHIRICI G, CORONA P, MONTAGHI A, TRAVAGLINI D 2009 Area-based assessment of forest standing volume by field measurements and airborne laser scanner data. Int J Remote Sens 30 (19): 5177-5194. DOI: http://dx.doi.org/10.1080/01431160903023017
- PACKALÉN P, MEHTÄTALO L, MALTAMO M 2011 ALS-based estimation of plot volume and site index in a eucalyptus plantation with a nonlinear mixed-effect model that accounts for the clone effect. Ann For Sci 68 (6): 1085-1092. DOI: http://dx.doi.org/10.1007/s13595-011-0124-9
- ESTORNELL J, RUIZ LA, VELÁZQUEZ-MARTÍ B, HERMOSILLA T 2012 Estimation of biomass and volume of shrub vegetation using LiDAR and spectral data in a Mediterranean environment. Biomass Bioenerg 46: 710-721. DOI: http://dx.doi.org/10.1016/j.biombioe.2012.06.023
- NÆSSET E 2004 Estimation of above- and below-ground biomass in boreal forest ecosystems. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 36 (8): 145-148
- KANKARE V, VASTARANTA M, HOLOPAINEN M, RÄTY, YU X, HYYPPÄ J, HYYPPÄ H, ALHO P, VIITALA R 2013 Retrieval of Forest Aboveground Biomass and Stem Volume with Airborne Scanning LiDAR. Remote Sens 5 (5): 2257-2274. DOI: http://dx.doi.org/10.3390/rs5052257
- PATENAUDE G, HILL RA, MILNE R, GAVEAU DLA, BRIGGS BBJ, DAWSON TP 2004 Quantifying forest above ground carbon content using LiDAR remote sensing. Remote Sens Environ 93 (3): 368-380. DOI: http://dx.doi.org/10.1016/j.rse.2004.07.016
- STEPHENS PR, KIMBERLEY MO, BEETS PN, PAUL TSH, SEARLES N, BELL A, BRACK C, BROADLEY J 2012 Airborne scanning lidar in a double sampling forest carbon inventory. Remote Sens Environ 117: 348-357. DOI: http://dx.doi.org/10.1016/j.rse.2011.10.009.
- RIAÑO D, VALLADARES F, CONDÉS S, CHUVIECO E 2003 Estimation of effective leaf area index and covered ground from airborne laser scanner (Lidar) in two contrasting forests. Agr Forest Meteorol 124 (3-4): 269-275. DOI: http://dx.doi.org/10.1016/j.agrformet.2004.02.005
- MORSDORF F, KÖTZ B, MEIER E, ITTEN K I, ALLGÖWER B 2006 Estimation of LAI and fractional cover from small footprint airborne laser scanning data based on gap fraction. Remote Sens Environ 104 (1): 50-61. DOI: http://dx.doi.org/10.1016/j.rse.2006.04.019
- RICHARDSON JJ, MOSKAL LM, KIM S-H 2009 Modeling approaches to estimate effective leaf area index from aerial discrete-return LIDAR. Agr Forest Meteorol 149 (6-7): 1152-1160. DOI: http://dx.doi.org/10.1016/j.agrformet.2009.02.007
- RIAÑO D, MEIER E, ALLGÖWER B, CHUVIECO E, USTIN SL 2003 Modeling airborne laser scanning data for the spatial generation of critical forest parameters in fire behavior modeling. Remote Sens Environ 86 (2): 177-186. DOI: http://dx.doi.org/10.1016/S0034-4257(03)00098-1
- RIAÑO D, CHUVIECO E, CONDIS S, GONZALEZ-MATESANZ J, USTIN S L 2004 Generation of crown bulk density for Pinus sylvestris from LIDAR. Remote Sens Environ 92 (3): 345-352. DOI: http://dx.doi.org/10.1016/j.rse.2003.12.014
- ANDERSEN H-E, REUTEBUCH SE, MCGAUGHEY RJ 2006 A rigorous assessment of tree height measurements obtained using airborne lidar and conventional field methods. Can J Remote Sens 32 (5): 355-366. DOI: http://dx.doi.org/10.5589/m06-030
- NAESSET E, ØKLAND T 2002 Estimating tree height and tree crown properties using airborne scanning laser in a boreal nature reserve. Remote Sens Environ 79 (1): 105-115. DOI: http://dx.doi.org/10.1016/S0034-4257(01)00243-7
- PERSSON Å, HOLMGREN J, SÖDERMAN U 2002 Detecting and measuring individual trees using an airborne laser scanner. Photogramm Eng Rem S 68 (9): 925-932
- POPESCU S, WYNNE R, NELSON R 2003 Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can J Remote Sens 29 (5): 564-577. DOI: http://dx.doi.org/10.5589/m03-027
- MALTAMO M, MUSTONEN K, HYYPPÄ J, PITKÄNEN J, YU X 2004 The accuracy of estimating individual tree variables with airborne laser scanning in boreal nature reserve. Can J Forest Res 34 (9): 1791-1801. DOI: http://dx.doi.org/10.1139/X04-055
- KOCH B, HEYDER U, WEINACKER H 2006 Detection of Individual Tree Crowns in Airborne Lidar Data. Photogramm Eng Remote S 72 (4): 357-363
- SOLBERG S, NÆSSET E, BOLLANDSAS O M 2006 Single Tree Segmentation Using Airborne Laser Scanner Data in a Structurally Heterogeneous Spruce Forest. Photogramm Eng Remote S 72 (12): 1369-1378
- HEURICH M 2008 Automatic recognition and measurement of single trees based on data from airborne laser scanning over the richly structured natural forests of the Bavarian Forest National Park. For Ecol Manag 255 (7): 2416-2433. DOI: DOI: http://dx.doi.org/10.1016/j.foreco.2008.01.022
- HIRATA Y, FURUYA N, SUZUKI M, YAMAMOTO H 2009 Airborne laser scanning in forest management: individual tree identification and laser pulse penetration in a stand with different levels of thinning. Forest Ecol Manag 258 (5): 752-760. DOI: http://dx.doi.org/10.1016/j.foreco.2009.05.017
- LI W, GUO Q, JAKUBOWAKI M K, KELLY M 2012 A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm Eng Remote S 78 (1): 75-84. DOI: http://dx.doi.org/10.14358/PERS.78.1.75
- GAVEAU DLA, HILL RA 2003 Quantifying canopy height underestimation by laser pulse penetration in small-footprint airborne laser scanning data. Can J Remote Sens 29 (5): 650-657. DOI: http://dx.doi.org/10.5589/m03-023
- LECKIE D, GOUGEON F, HILL D, QUINN R, ARMSTRONG L, SHREENAN R 2003 Combined high-density lidar and multispectral imagery for individual tree crown analysis. Can J Remote Sens 29 (5): 633-649. DOI: http://dx.doi.org/10.5589/m03-024
- YU X, HYYPPÄ J, HYYPPÄ H, MALTAMO M 2004 Effects of flight altitude on tree height estimation using airborne laser scanning. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences36 (8): 96-101
- MORSDORF F, MEIER E, KOETZ B, ITTEN K I, DOBBERTIN M, ALLGÖWER B 2004 LIDAR-based geometric reconstruction of boreal type forest stands at single tree level for forest and wildland fire management. Remote Sens Environ 92 (3): 353-362. DOI: http://dx.doi.org/10.1016/j.rse.2004.05.013
- FALKOWSKI M J, SMITH A M S, HUDAK A T, GESSLER P E, VIERLING L A, CROOKSTON N L 2006 Automated estimation of individual conifer tree height and crown diameter via two-dimensional spatial wavelet analysis of lidar data. Can J Remote Sens 32 (2): 153-161. DOI: http://dx.doi.org/10.5589/m06-005
- ELDPAUSCH TR, LLOYD J, LEWIS S L, BRIENEN R J W, GLOOR M, MONTEAGUDO MENDOZA A, LOPEZ-GONZALEZ G, BANIN L, et al. 2012 Tree height integrated into pantropical forest biomass estimates. Biogeosciences 9 (8): 3381-3403. DOI: http://dx.doi.org/10.5194/bg-9-3381-2012
- NELSON R, SWIFT R, KRABILL W 1988 Using airborne lasers to estimate forest canopy and stand characteristics. J Forest 86 (10): 31-38
- TAKAHASHI T, YAMAMOTO K, SENDA Y, TSUZUKU M 2005 Estimating individual-tree heights of sugi (Cryptomeria japonica D. Don) plantations in mountainous areas using small-footprint airborne LiDAR. J Forest Res-JPN 10 (4): 135-142. DOI: http://dx.doi.org/10.1007/s10310-004-0125-8
- HYYPPÄ J, INKINEN M 1999 Detecting and estimating attributes for single trees using laser scanner. Photogrammetric Journal of Finland 16 (2): 27-42
- HOLLAUS M, WAGNER W, EBERHÖFER C, KAREL W 2006 Accuracy of large-scale canopy heights derived from LiDAR data under operational constraints in a complex alpine environment. ISPRS J Photogramm 60 (5): 323-338. DOI: http://dx.doi.org/10.1016/j.isprsjprs.2006.05.002
- VÉGA C, DURRIEU S 2011 Multi-level filtering segmentation to measure individual tree parameters based on Lidar data: Application to a mountainous forest with heterogeneous stands. Int J Appl Earth Obs 13 (4): 646-656. DOI: http://dx.doi.org/10.1016/j.jag.2011.04.002
- VAUHKONEN J 2010 Estimating crown base height for Scots pine by means of the 3D geometry of airborne laser scanning data. Int J Remote Sens 31 (5): 1213-1226. DOI: http://dx.doi.org/10.1080/01431160903380615
- POPESCU S C 2007 Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenerg 31 (9): 646-655. DOI: http://dx.doi.org/10.1016/j.biombioe.2007.06.022
- ANJIN C, YONGMIN K, YONGIL K, YANGDAM 2012 Estimation of Individual Tree Biomass from Airborne Lidar Data using Tree Height and Crown Diameter. Disaster Advances 5 (4): 360-365
- NAKAI Y, HOSOI F, OMASA K 2009 Estimating carbon stock of coniferous woody canopy trees using airborne lidar and passive optical senser. In: Bretar F, Pierrot-Deseiligny M, Vosselman G (eds) Laser scanning 2009. IAPRS, Paris, France. Vol 36, Part 3/W8, pp 289-292. URL: http://park.itc.u-tokyo.ac.jp/joho/Omasa/463.pdf (25 May 2013)
- HATAMI F 2012 Carbon estimation of individual trees using high laser density of airborne lidar (a case study in Bois-Noir, France). MSc thesis, Faculty of Geo-Information, Science and Earth Observation, University of Twente, Enschede, the Netherlands, 164 p
- KIM S 2007 Individual tree species identification using LIDAR- derived crown structures and intensity data. PhD thesis, University of Washington, Washington, USA, 122 p
- KIM S, MCGAUGHEY R J, ANDERSEN H-E, SCHREUDER G 2009 Tree species differentiation using intensity data derived from leaf-on and leaf-off airborne laser scanner data. Remote Sens Environ 113 (8): 1575-1586. DOI: http://dx.doi.org/10.1016/j.rse.2009.03.017
- VAUGHN NR, MOSKAL LM, TURNBLOM EC 2012 Tree Species Detection Accuracies Using Discrete Point Lidar and Airborne Waveform Lidar. Remote Sens4 (2): 377-403. DOI: http://dx.doi.org/10.3390/rs4020377
- WAGNER W, HOLLAUS M, BRIESE C, DUCIC V 2008 3D vegetation mapping using small-footprint full-waveform airborne laser scanners. Int J Remote Sens 29 (5): 1433-1452. DOI: http://dx.doi.org/10.1080/01431160701736398
- ØRKA HO, NÆSSET E, BOLLANDSÅS OM 2009 Classifying species of individual trees by intensity and structure features derived from airborne laser scanner data. Remote Sens Environ 113 (6): 1163-1174. DOI: http://dx.doi.org/10.1016/j.rse.2009.02.002
- DONOGHUE DNM, WATT PJ, COX NJ, WILSON J 2007 Remote sensing of species mixtures in conifer plantations using LiDAR height and intensity data. Remote Sens Environ 110 (4): 509-522. DOI: http://dx.doi.org/10.1016/j.rse.2007.02.032
- PERSSON Å, HOLMGREN J, SÖDERMAN U, OLSSON H 2004 Tree species classification of individual trees in Sweden by combining high resolution laser data with high resolution near infrared digital images. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 36 (8): 204-207
- DALPONTE M, BRUZZONE L, GIANELLE D 2008 Fusion of hyperspectral and LIDAR remote sensing data for classification of complex forest areas. IEEE T Geosci Remote 46 (5): 1416-1427. DOI: http://dx.doi.org/10.1109/TGRS.2008.916480
- HOLMGREN J, PERSSON A, SÖDERMAN U 2008 Species identification of individual trees by combining high resolution LIDAR data with multispectral images. Int J Remote Sens 29 (5): 1537-1552. DOI: http://dx.doi.org/10.1080/01431160701736471
- VERRELST J, GEERLING GW, SYKORA KV, CLEVERS JGPW 2009 Mapping of aggregated floodplain plant communities using image fusion of CASI and LiDAR data. Int J Appl Earth Obs 11 (1): 83-94. DOI: http://dx.doi.org/10.1016/j.jag.2008.09.001
- DINULS R, ERINS G, LORENCS A, MEDNIEKS I, SINICA-SINAVSKIS J 2012 Tree Species Identification in Mixed Baltic Forest Using LiDAR and Multispectral Data. IEEE J Sel Top Appl 5 (2): 594-603. DOI: http://dx.doi.org/10.1109/JSTARS.2012.2196978
- SELETKOVIĆ A, PERNAR R, ANČIĆ M, SUČIĆ JELENA 2011 Assessment of stand structural elements on the basis of spectral reflectance values of an IKONOS satellite image. Croat J For Eng 32 (1): 329-343
- BALENOVIĆ I, SELETKOVIĆ A, PERNAR R, MARJANOVIĆ H, VULETIĆ D, PALADINIĆ E, KOLIĆ J, BENKO M 2011 Digital Photogrammetry – State of the Art and Potential for Application in Forest Management in Croatia. South-East Eur For 2 (2): 81-93. DOI: http://dx.doi.org/10.15177/seefor.11-09
- BALENOVIĆ I, SELETKOVIĆ A, PERNAR R, MARJANOVIĆ H, VULETIĆ D, BENKO M 2012 Comparison of Classical Terrestrial and Photogrammetric Method in Creating Management Division. In: Pentek T, Poršinsky T, Šporčić M (eds) Forest Engineering - Concern, Knowledge and Accountability in Today’s Environment, Proceedings of 45th International Symposium on Forestry Mechanization. Dubrovnik, Croatia, 8-12 October. Forestry Faculty of University Zagreb, Zagreb, Croatia, pp 1-13
- BALENOVIĆ I, MARJANOVIĆ H, INDIR K, VULETIĆ D, OSTROGOVIĆ M Z, BENKO M 2013 Estimation of the Stands’ Arithmetic Mean Diameter using Manual Method of Digital Photogrammetry. Period Biol 115 (3): 399-407
- PACKALÉN P, MALTAMO M 2008 Estimation of species-specific diameter distributions using airborne laser scanning and aerial photographs. Can J Forest Res 38 (7): 1750-1760. DOI: http://dx.doi.org/10.1139/X08-037
- NÆSSET E, GOBAKKEN T, HOLMGREN J, HYYPPÄ H, HYYPPÄ J, MALTAMO M,NILSSON M, OLSSON H, PERSSON A, SODERMAN U 2004 Laser scanning of forest resources: The Nordic experience. Scand J Forest Res 19 (6): 482-499. DOI: http://dx.doi.org/10.1080/02827580410019553
- KAARTINEN H, HYYPPÄ J, YU X, VASTARANTA M, HYYPPÄ H, KUKKO A, HOLOPAINEN M, HEIPKE C, et al. 2012 An International Comparison of Individual Tree Detection and Extraction Using Airborne Laser Scanning. Remote Sens 4 (4): 950-974. DOI: http://dx.doi.org/10.3390/rs4040950
- ČAVLOVIĆ J 2010 The first national forest inventory Republic of Croatian. Ministry of Regional Development, Forestry and Water Management, Zagreb, Croatia, 296 p
- ŠPANJOL Ž, ROSAVEC R, BARČIĆ D, GALIĆ I 2011 Flammability and Combustibility of Aleppo Pine (Pinus halepensis Mill.) Stands. Croat J For Eng 32 (1): 121-129
- IPCC 2013 Working Group I Contribution to the IPCC Fifth Assessment Report Climate Change 2013: The Physical Science Basis, Summary for Policymakers. URL: http://www.climatechange2013.org/images/uploads/WGIAR5‑SPM_Approved27Sep2013.pdf (1 October 2013)
© 2015 by the Croatian Forest Research Institute. This is an Open Access paper distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0).